Optimizing Relocalization Likelihood in Challenging Environments with Reinforcement Learning
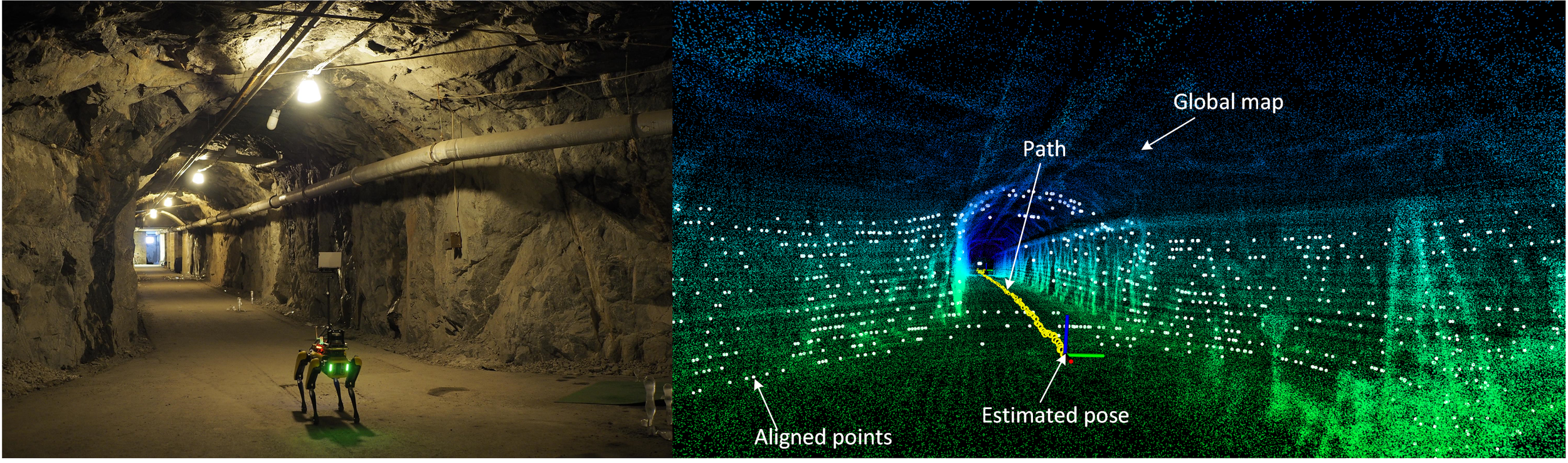
Figure 1: Visual representation of an experimental environment to the left and the estimated pose in the global point cloud map to the right. Where white points represent the aligned point cloud, green and blue points represent the global map, the trajectory is represented with yellow color and estimated pose with coordinate frame.
Master Thesis proposal in Robotics and AI
OVERVIEW
Relocalization in robotics involves determining a robot’s position and orientation within a known map after losing its localization. This task becomes particularly challenging in environments with dynamic elements, featureless regions, or partial map overlaps. Traditional relocalization methods often struggle in such scenarios, leading to degraded performance in tasks like navigation or mapping. This thesis explores how Reinforcement Learning (RL) can improve relocalization likelihood in challenging environments. By framing relocalization as a decision-making problem, the robot learns a policy that optimizes its actions to maximize the probability of successful localization. The focus will be on leveraging RL to identify key regions, align sensor observations with map features, and adaptively reconfigure sensors or motion strategies to enhance relocalization performance.
OBJECTIVES
The objectives of the thesis are the following:
Reinforcement Learning Formulation: Define relocalization as an RL problem, including state representations (sensor observations, map features), action space (robot motion, sensor adjustments), and reward structure to maximize the likelihood of successful relocalization.
Policy Learning and Feature Matching: Select and implement an appropriate RL algorithm (e.g., PPO, SAC) for training the relocalization policy. Incorporate feature extraction and matching techniques (e.g., key points, descriptors) into the policy to guide decisions effectively in challenging environments.
Simulation Testing and Evaluation: Set up challenging scenarios in Gazebo for testing, including low-feature areas. Evaluate the trained policy on metrics such as relocalization success rate, efficiency, and robustness.
CONTACT
Proposal from Nikolaos Stathoulopoulos (Ph.D Student), Christoforos Kanellakis (Assoc. Snr. Lecturer) and George Nikolakopoulos (Prof. and Head of Subject), Robotics and AI Group, SRT
Nikolaos Stathoulopoulos, Room A2545, e-mail: nikolaos.stathoulopoulos@ltu.se
Christoforos Kanellakis, Room A2555, email: christoforos.kanellakis@ltu.se
George Nikolakopoulos, Room A2556, e-mail: george.nikolakopoulos@ltu.se