Reinforcement Learning based Coordinated Motion Planning for Multiple Floating Satellite Emulation Platforms (Sliders)

Master Thesis proposal in Robotics and AI
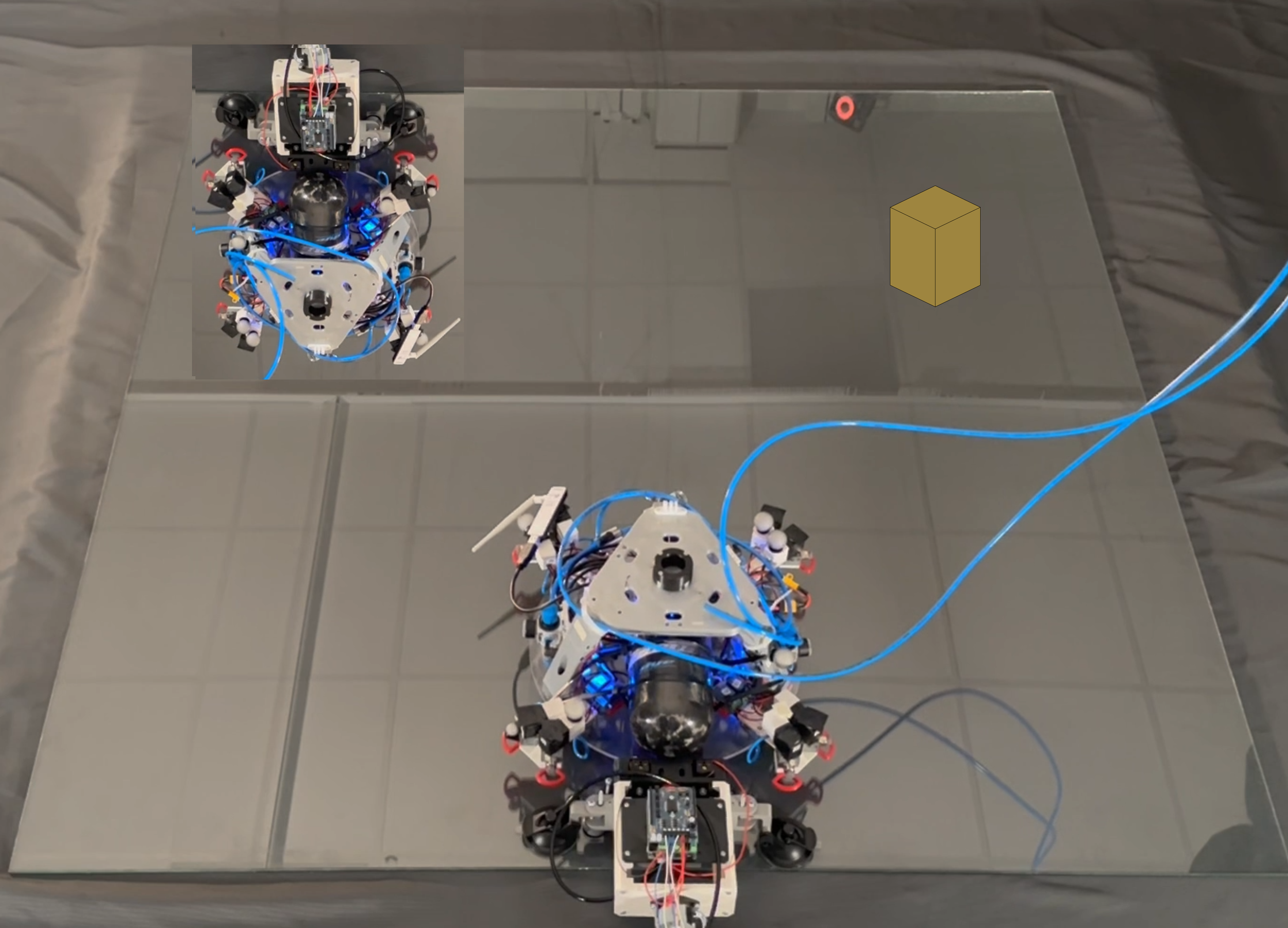
Floating satellite emulation platforms are emerging space robotic high-fidelity demonstration systems designed to emulate free-floating conditions and functionalities of realistic space-alike motion. One such design platform is developed in the Robotics and AI (RAI) lab as part of space robotics research, termed as the ‘Slider’. These platforms enable advanced testing, simulation, and development of space guidance navigation and control technologies on the ground, facilitating the refinement and enhancement of satellite operations and maneuvers in a controlled environment. The platform is supported with air-bearings to levitate over a smooth surface emulating gravity-free friction-less motion. It has eight thrusters to performer controlled planner motion (translational and rotational). The thesis aims to design and implement a Reinforcement Learning (RL) policy-based conflict-free intelligent motion planning for imitating safe autonomous docking. The task envisioned to integrate a vision-based detection module identifying the docking port and conflicting objects if any within the vicinity towards enabling fully autonomous onboard operation. Each space robot has eight thrusters which can have only two values either on or off. The RL policy, based on the task, should choose an action 𝑎𝑖 ∈ R8×1 from the available action space 𝐴 = 𝑎𝑖 . The designed RL policy will be trained for multi-agent systems in simulation and eventually will be experimentally evaluated to close the sim-to-real gap.
The main contributions of the thesis will be:
Formulate an RL algorithm for a multi-agent exploration problem.
Develop the environment and RL algorithm for the multi-agent exploration for object detection and docking.
Train and test the RL policy.
Implement the developed policy of real-time hardware system.
Contact:
fromVidya Sumathy (vidya.sumathy@ltu.se),
Avijit Banerjee (avijit.banerjee@ltu.se),
George Nikolakopoulos (geonik@ltu.se)